
DexScale
A Diverse and Large-Scale Dataset for General Vision-Tactile Dexterous Manipulation
Dexterous manipulation is essential for building general-purpose embodied agents, yet learning such skills remains challenging due to high-dimensional hand control, complex contact dynamics, and the lack of large-scale, high-quality datasets. Existing robot manipulation datasets are often limited to simple grippers, visual observations, single embodiments, or short-horizon tasks, making them insufficient for studying general dexterous manipulation.
In this work, we introduce DexScale, a diverse and large-scale vision-tactile dataset designed for general dexterous robotic manipulation. DexScale supports dexterous hands with different degrees of freedom and provides synchronized multimodal observations, including robot actions, RGB-D visual perception, and in-hand tactile sensing. Built upon a high-fidelity isomorphic data collection system, DexScale captures fine-grained, smooth, and contact-rich manipulation trajectories that are difficult to obtain with conventional teleoperation pipelines.
The dataset covers a broad range of tasks and scenarios, including tool use, dexterous object manipulation, diverse grasping, bimanual coordination, long-horizon execution, and interactions in varied environments. By scaling dexterous manipulation data across embodiments, modalities, tasks, and scenes, DexScale provides a foundation for training and evaluating policies that integrate spatial perception, tactile feedback, and precise hand control. Together, DexScale aims to bridge the gap between large-scale robot learning and fine-grained dexterous control, offering a data foundation for developing general-purpose vision-tactile manipulation policies.
Dataset Statistics
Diversity and usability assurance through strategic collection.
Scenarios Distribution
Atomic-Skills Distribution
Object Categories
Episode Duration
Multimodal Scenarios
Dexterous Hand Series
Two hands from lightweight deployment to high-DoF precision: linkage drive with CAN/RS485, integrating seamlessly across our humanoid platforms.

High-DoF dexterous hand
Linker Hand L20
Basic specifications
| Degrees of freedom | 16 |
| Number of joints | 21 (16 active + 5 passive) |
| Drive type | Linkage transmission |
| Control interface | CAN/RS485 |
| Communication rate | 500 Hz |
| Weight | ≈1200 g |
| Max. payload | 20 kg |
| Operating voltage | DC 24V—48V |
| Quiescent current | 0.3 A |
| Avg. no-load motion current | 0.4 A |
| Max. current | 1.8 A |
| Repeat positioning accuracy | ±0.2 mm |
| Open/close time | 0.9 s |

Lightweight dexterous hand
Linker Hand L6
Basic specifications
| Degrees of freedom | 6 |
| Number of joints | 11 (6 active + 5 passive) |
| Drive type | Linkage transmission |
| Control interface | CAN/RS485 |
| Weight | 607 g |
| Max. payload | 28 kg |
| Operating voltage | DC 24V ±10% |
| Quiescent current | 0.2 A |
| Avg. no-load motion current | 0.75 A |
| Max. current | 1.4 A |
| Repeat positioning accuracy | <±0.2 mm |
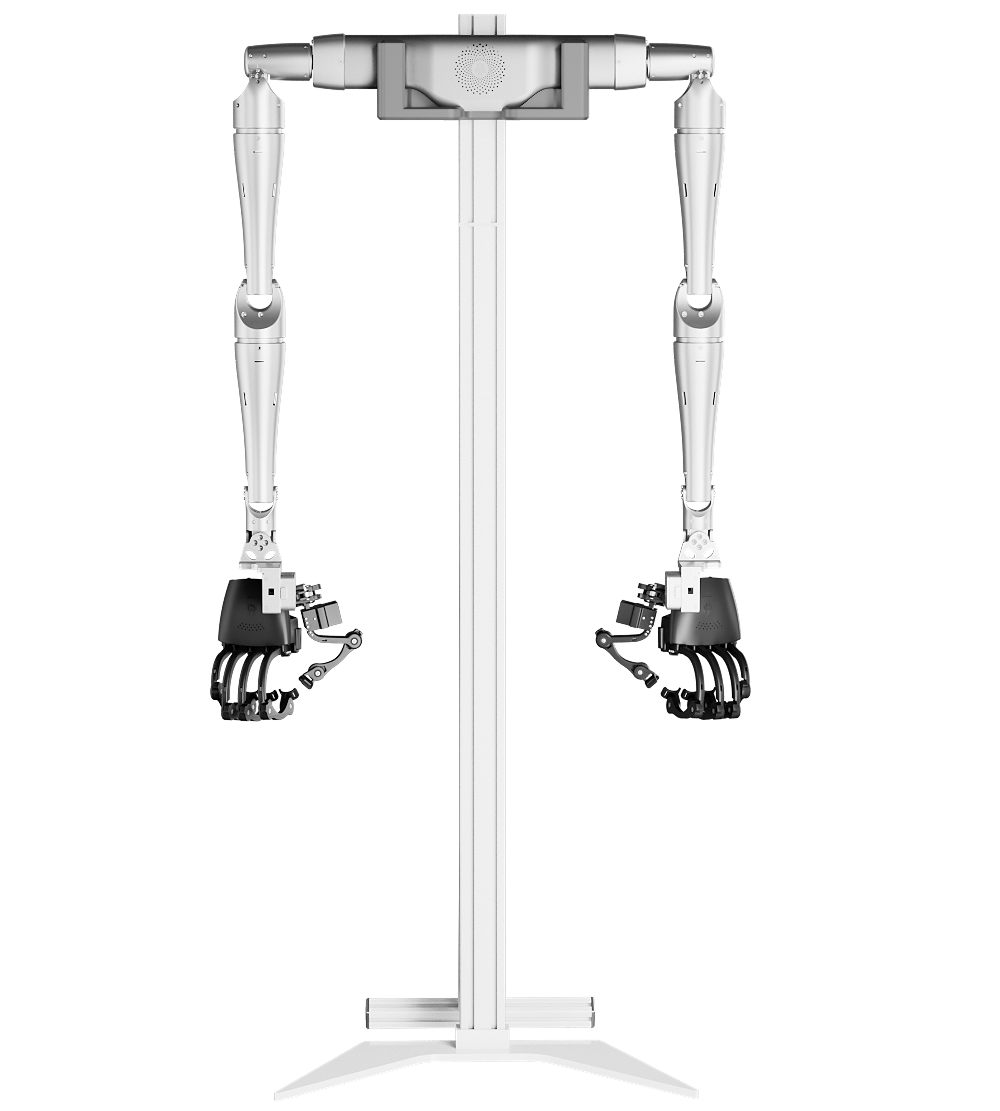
Robot teleoperation system
Deep integration with data collection: real-time capture of robot and teleop device telemetry to support reliable data for humanoid foundation model training.
Teleoperation arm LTA
- DoF: 7 per arm, 14 total (dual arms)
- Single-arm reach: 658 mm
- Mounting: suspended and chest-worn
- Rated supply: 24 V, 0.075 A
- Device weight: 1.4 kg
- Bus: CAN at 1 Mbps
- Sampling rate: 200 Hz
- Joint angle resolution: 0.087°
Force-feedback glove LFFG
- Tracking: 21 DoF per hand, high-precision joint angles
- Data rate: 100 Hz wired / 30 Hz wireless
- Power: 5 V USB Type-C
- Weight: 390 g
- Joint angle accuracy: 0.08°
- Peak torque: 3.5 kg·cm
- Compatible with the full Linker Hand lineup
Acknowledgement Requirement
If users conduct any analysis, data mining, model training, evaluation, or secondary development based on data from the DEXSCALE platform and produce papers, industry reports, open-source projects, model weights, or other public outputs, they must indicate the data source: https://dexscale.github.io/ and include the following acknowledgement:
Data source: DEXSCALE, a diverse and large-scale dataset for general vision-tactile dexterous manipulation.